When using the vtk.vtkWindowToImageFilter to produce a buffered image of the distances to the mesh in the rendering scene, is it possible to use the 0-1 depth ranges to recover the true distances from the camera to the mesh?
0 is the near clipping plane, 1 is that far clipping plane. The in between values depend on if you are in parallel or perspective mode. For parallel it is just linear between near/far. For perspective
zbuff = 0.5 + (near + far + 2*near*far/zval)/(2*(far - near))
zbuff - 0.5 = (near + far + 2*near*far/zval)/(2*(far - near))
(zbuff - 0.5) *2*(far - near) = near + far + 2*near*far/zval
(zbuff - 0.5) *2*(far - near) - near - far = 2*near*far/zval
((zbuff - 0.5) *2*(far - near) - near - far)/(2*near*far) = 1/zval
2*near*far/((zbuff - 0.5) *2*(far - near) - near - far) = zval
Where zbuff is between 0 and 1.0, near and far are the near and far clipping distances (always positive) and zval is the distance on the view plane normal from the camera (always negative values with VTK right handed coord system)
What about if the view is set to perspective? Is there any functionality in VTK to assist in these calculations?
Currently, I’ve gotten myself down a rabbit hole where I think I may be close to the desired result:
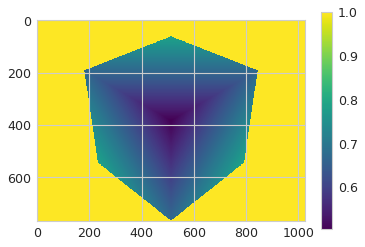
...# Got the image from the rendering scene as `img` NumPy image array
import numpy as np
import vtki
import matplotlib.pyplot as plt
plt.imshow(img)
plt.colorbar()
plt.show()
So I was looking back at this thread with a colleague as we’re implementing this depth mapping in PyVista as a part of a research project and we realized that I totally read your original post wrong… turns out you answered exactly what I was asking (only took ~6 months to realize it ).
For anyone who needs an elegant solution, check out this using PyVista (which will be updated in PyVista before long such the the image_depth attribute returns the image with depth to the camera like shown below):
import numpy as np
import pyvista as pv
import matplotlib.pyplot as plt
from pyvista import examples
mesh = examples.load_random_hills()
pv.close_all()
p = pv.Plotter()
p.add_mesh(mesh, color=True)
p.show(auto_close=False)
near, far = p.camera.GetClippingRange()
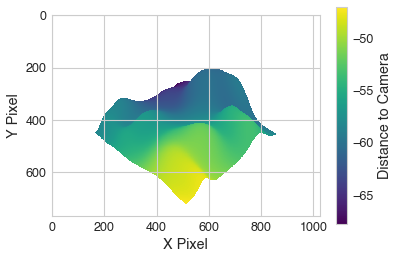
zval = 2*near*far/((p.image_depth[:,:,0] - 0.5) *2*(far - near) - near - far)
zval[zval <= -far] = np.nan
plt.imshow(zval)
plt.colorbar(label='Distance to Camera')
plt.xlabel('X Pixel')
plt.ylabel('Y Pixel')
 ).
).