Hi:
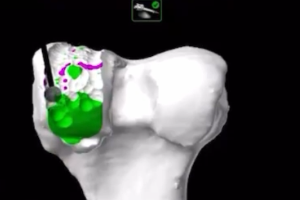
Thanks for your reading. There are a question confused me, there are a femur model, and probe model. I control the probe to grind the femur. I can capture the collision caused by probe and femur. BUT I want to change the femur model outlook realtime. JUSH LIKE BELOW PICTURE
the white part is femur bone, and the green part is grinded region, if the probe model contacts the green part, the triangle cell will be change, the green part will disappear gradually.
We implement this over at iMSTK (which uses VTK). And coincidently even do erosion on a femur bone. See this example. We use a chunking approach to do it at super fast rates (>1000hz).
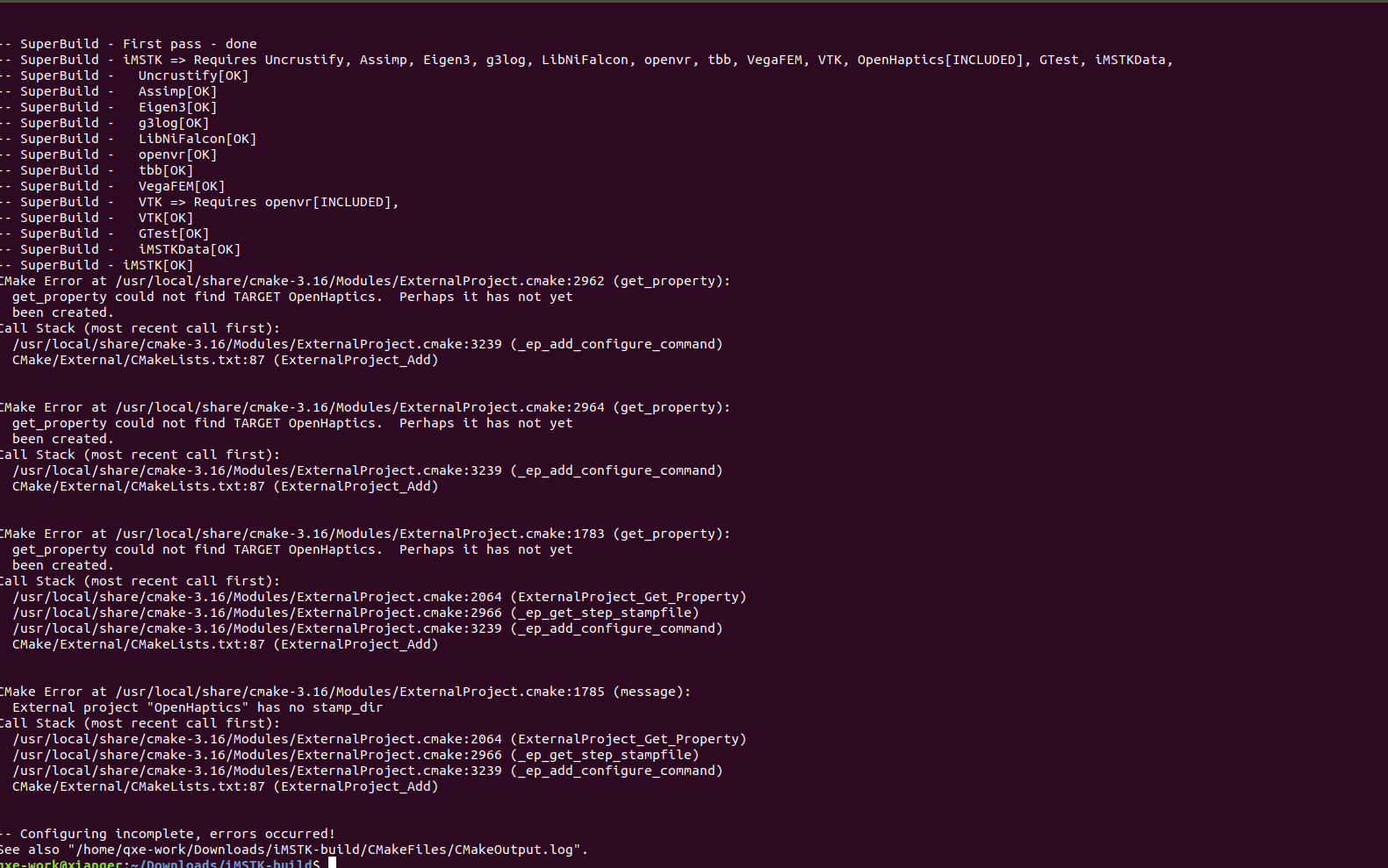
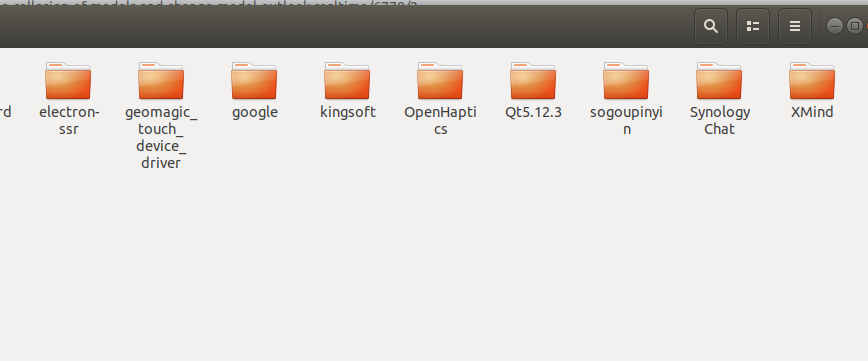
i want to run the example: FemurCut , so i install the openhaptics and geomagic_touch_device_driver, in the “/opt/openhaptics” and “opt/geomagic_touch_device_driver”, then i change cmake variable “iMSTK_USE_OpenHaptics” to “ON” and run cmake …/iMSTK. The terminal print error “cant find openHaptics”
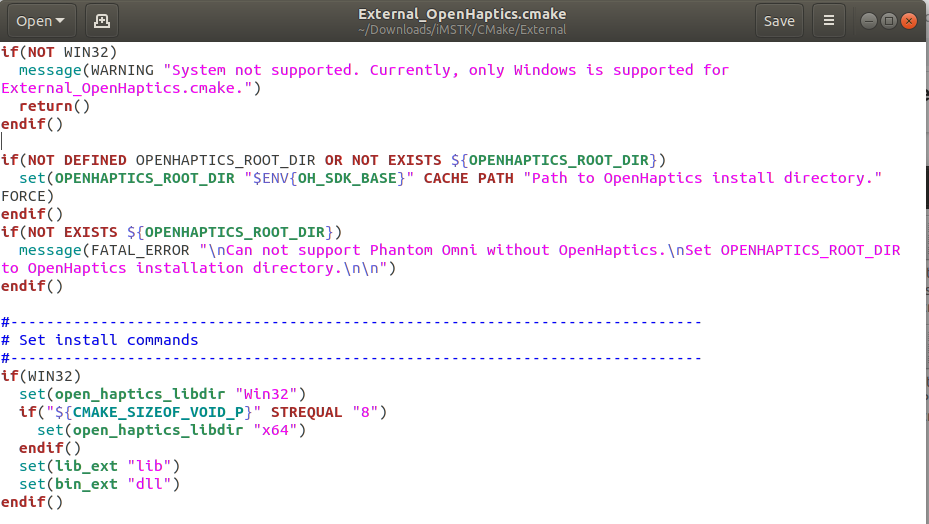
We don’t support OpenHaptics on Linux, only on Windows. Though if you wanted to contribute any code to iMSTK to get it working on Linux feel free to submit an MR. But for further discussion and iMSTK related question, please post this over on the imstk forums.
Also FindOpenHaptics.cmake searches for OpenHaptics via a system variable that is created by the installer when installing open haptics (OH_SDK_BASE).