I believe he refers to this:
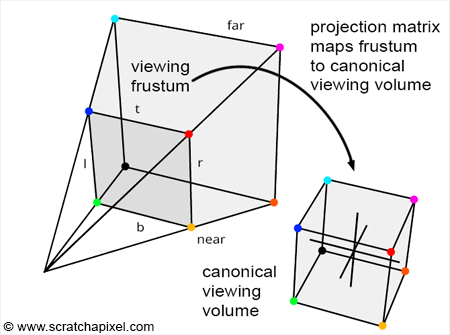
If you apply the projection matrix (a.k.a. projection transform) to your geometry, you’ll have it in homogeneous coordinates such that now it is relatively easy to do occlusion tests. I believe vtkCamera::GetProjectionTransformMatrix() (VTK: vtkCamera Class Reference) returns the matrix you can use for this.