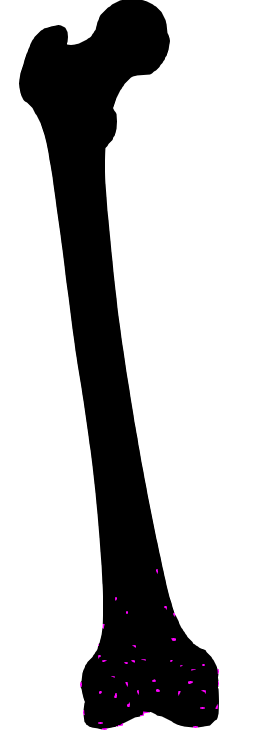
I am currently using the Iterative Closest Point (ICP) algorithm provided by the VTK library for my 3D bone model. I have a set of 60 points from one part of the object, and I am trying to register them. Below is an image showing the current configuration, where the bottom part of the object is at the origin (0, 0, 0):
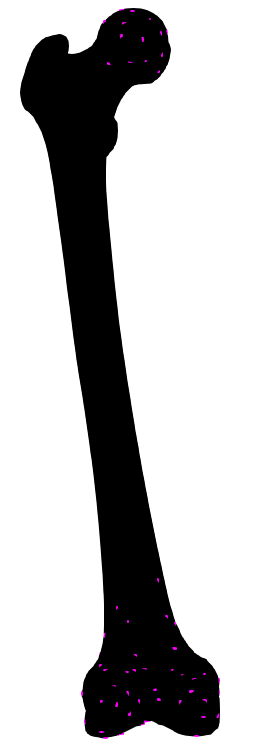
Next, I add more points from the other side of the object, as shown in the following image:
I expected that adding more information would decrease the registration error (note: when I say “registration error,” I am referring to the error based on the transformation matrix I compute, not the ICP algorithm itself). For example, if my target transformation is a rotation of (0, 0, 50) in each axis and (0, 0, 0) for the translation, I calculate the error based on this target transformation.
However, the results show that the error actually increases when I add more points from the top of the object. And it dosen’t matter how many points I add, It increases. I don’t understand why this is happening, as ICP appears to be working well. Could this be due to the geometry of the object or the distance between points? I am trying to figure out why adding more points leads to a higher error, despite expecting the opposite outcome.