I have 1 scan. I have split the scan into 2 point clouds that have about 10 percent overlap. I offset one point cloud by .5 units in the X direction. I am trying to use the icp object to put the point clouds back together. When I apply the icp though I always get the same results. I have tried to vary what parameters I have like iteration max, number of points loaded, and mean distance but get the same result. Am I using this object wrong? I am following the vtk example of the icp object: https://kitware.github.io/vtk-examples/site/Python/Filtering/IterativeClosestPoints/
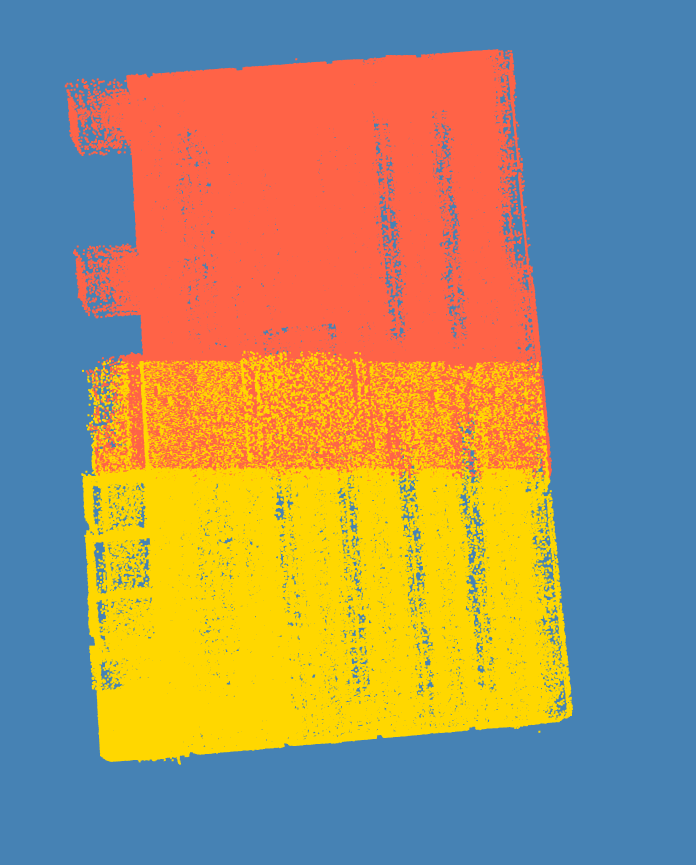
Before Transformation (just slightly offset to the right):
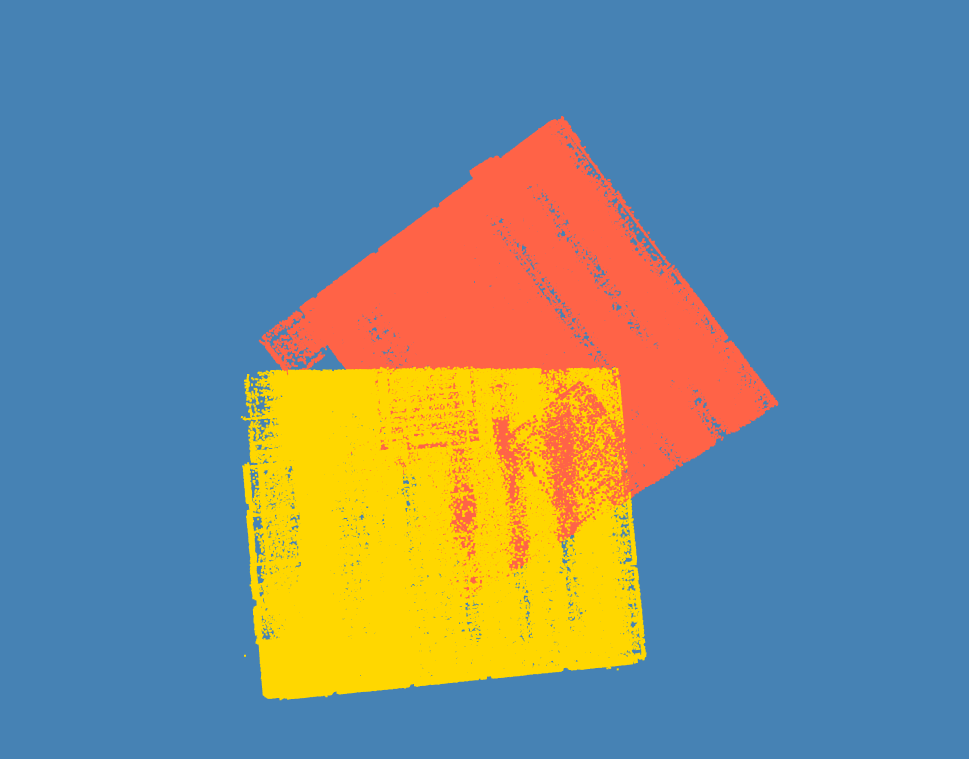
Results:
1,000,000 points per scan:
This is the function I am using to apply the icp object:
def applyICP(source, target):
icp = vtk.vtkIterativeClosestPointTransform()
icp.SetSource(source)
icp.SetTarget(target)
icp.SetMaximumMeanDistance(0.0000001)
icp.GetLandmarkTransform().SetModeToRigidBody()
icp.SetMaximumNumberOfIterations(30)
icp.CheckMeanDistanceOn()
icp.Modified()
icp.Update()
return icp