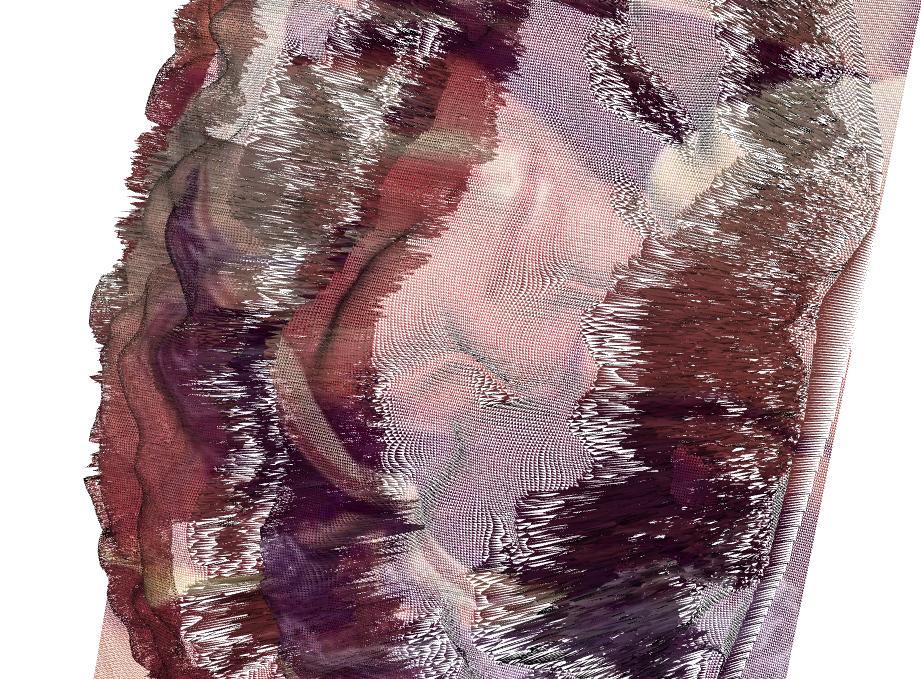
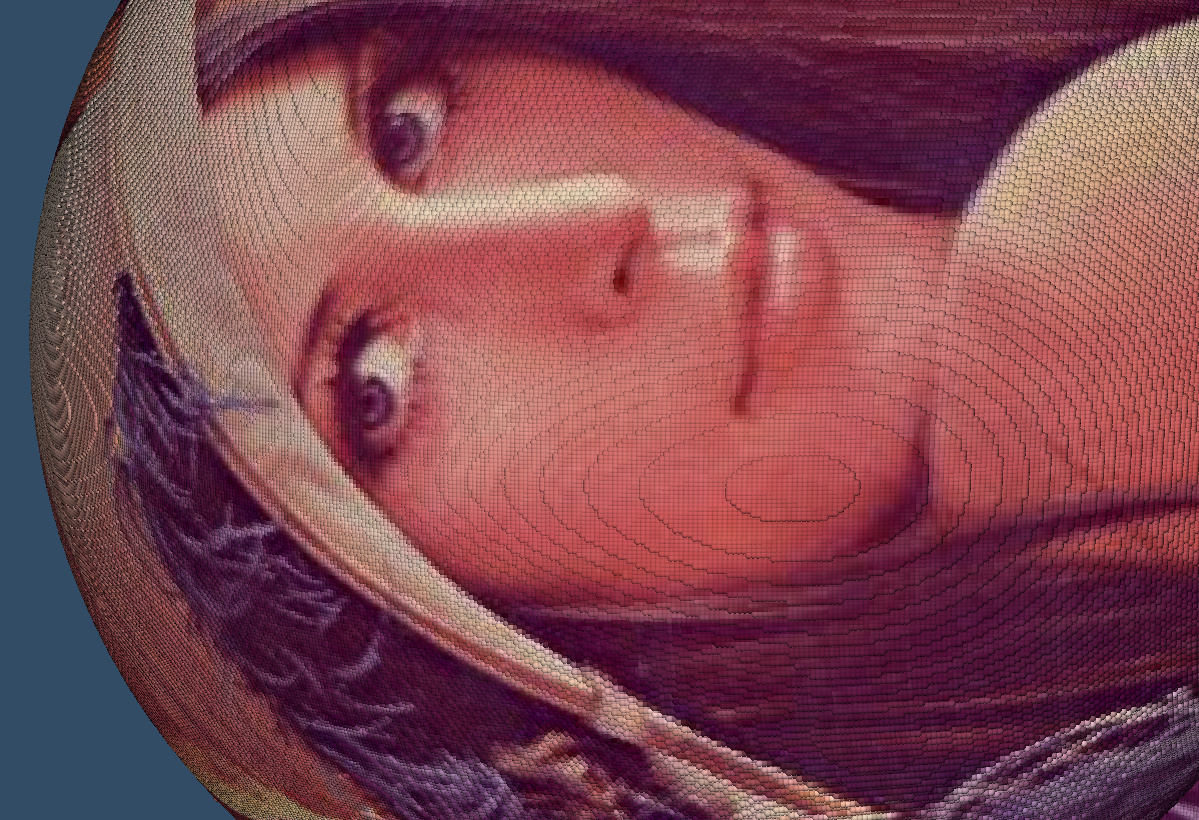
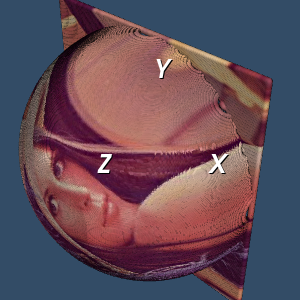
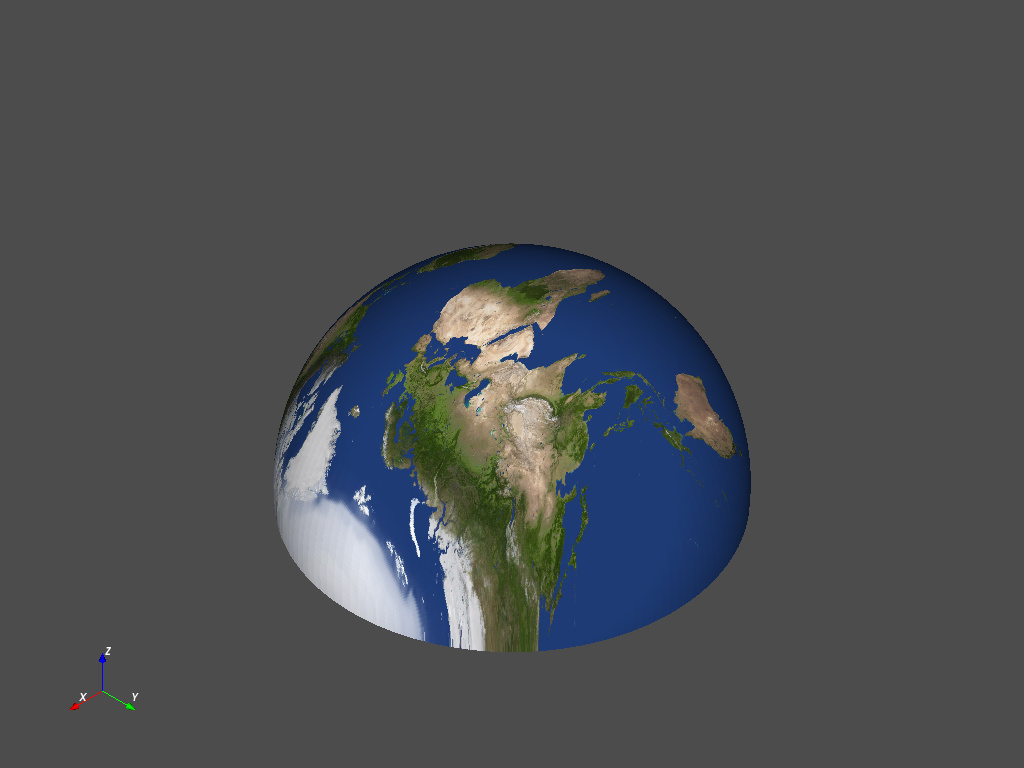
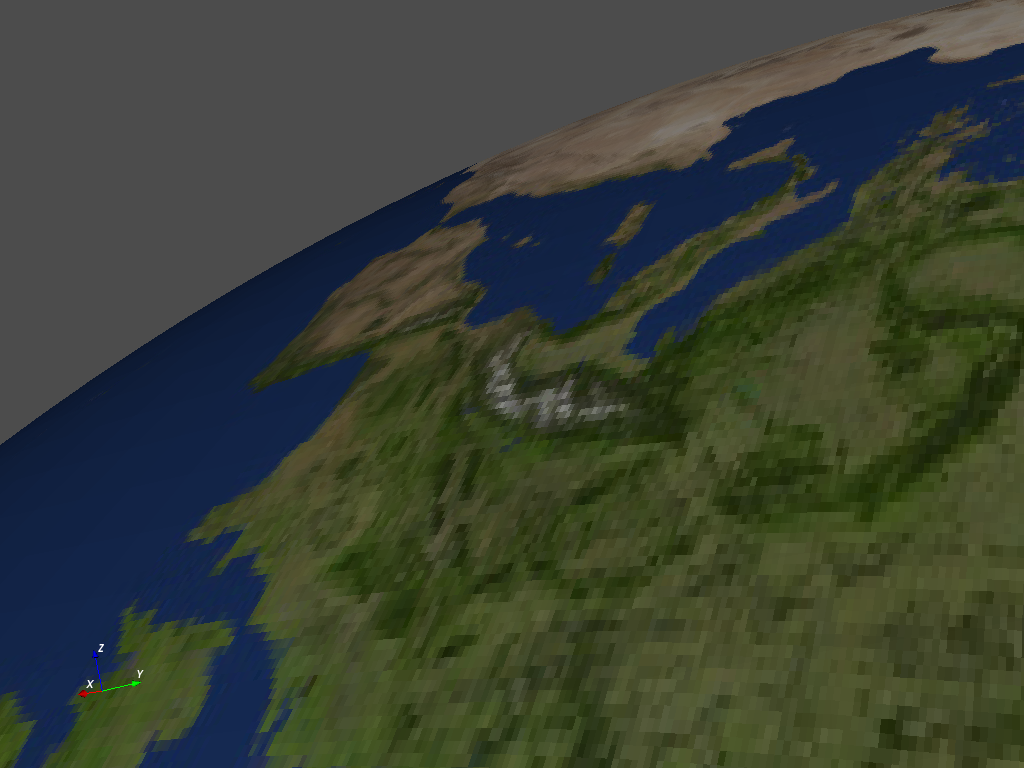
Yes sure, I have an algorithm working but not the best solution. The whole work flow is shown in the following steps:
- Read a stl file (.stl) as a 3D model, called model A
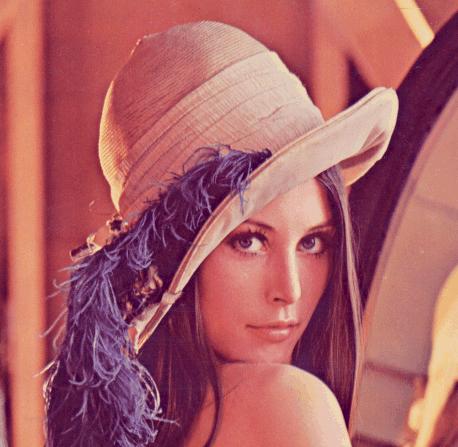
- Read a image file (.png or .jpg)
- According to the image size and the shape of the stl file, create a meshgrid for color interpolation. Thus we create a 3D model with color textured, called model B.
- For each point in the model A, assign the color vector to this point in the meshgrid with the “nearest” point found in the model B.
- Use look up table for stl color visualization.
Note: I am not allowed to attach files so I upload with the google drive link (.stl files and color.npy):
https://drive.google.com/drive/folders/1Qa9kysHJPxWXejoeTUjJYQW5-hI0vDSO?usp=sharing
The code is shown in the following. It is a little bit complicated so I only show the main function here, attached with the necessary .npy files:
# Show the colorized stl file
# Generate the stl model – we need to first know the color vector of the objects
f = vtk.vtkSTLReader()
f.SetFileName(self.stl_path) // here, use the path of the .stl file, attached with this link
f.Update()
# Update the frame rate
obj = f.GetOutputDataObject(0)
min_z, max_z = obj.GetBounds()[4:]
lut = vtk.vtkLookupTable()
lut.SetTableRange(min_z, max_z)
lut.Build()
heights = vtk.vtkDoubleArray()
heights.SetName(“Z_Value”)
# Load the color object
Colors = vtk.vtkUnsignedCharArray()
Colors.SetNumberOfComponents(3)
Colors.SetName(“Colors”)
# Load the color stl file (N x 3 vector)
COLOR = np.load(self.colorstl_file) // here, use the path of the color.npy file, attached with this link
for i in range(obj.GetNumberOfPoints()):
z = obj.GetPoint(i)[-1]
Colors.InsertNextTuple3(COLOR[i, 0], COLOR[i, 1], COLOR[i, 2])
obj.GetPointData().SetScalars(Colors)
mapper = vtk.vtkPolyDataMapper()
mapper.SetInputDataObject(obj)
mapper.SetScalarRange(min_z, max_z)
mapper.SetLookupTable(lut)
actor = vtk.vtkActor()
actor.SetMapper(mapper)
renderer = vtk.vtkRenderer()
renderer.AddActor(actor)
renderer.SetBackground(.1, .2, .4)
renw = vtk.vtkRenderWindow()
renw.AddRenderer(renderer)
iren = vtk.vtkRenderWindowInteractor()
iren.SetRenderWindow(renw)
renw.Render()
iren.Start()
I am still looking for a better way to do that. There are several problems:
- image resolution attached with the triangulation mesh in the stl file
- I am still figuring out a way to use triangulation filter.