Dear VTK Forum,
I am encountering a challenge while working with vtkValuePass and have uncertainties regarding the depth value computation. I expect the depth values to behave similarly to the geometric coordinates they correspond to, as they do with a color map. However, objects that should be behind a surface seem to be drawn in front of it.
I have attached some screenshots for better illustration:
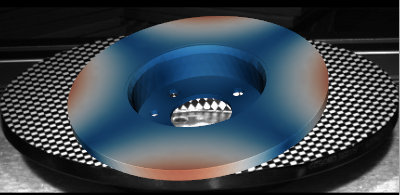
The color map rendering looks like this :
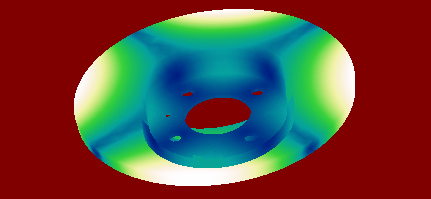
The vtkValuePass rendering like this :
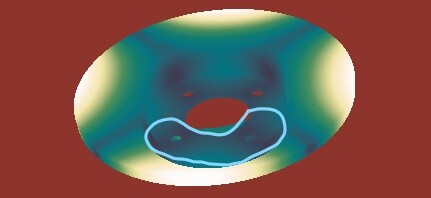
The part that looks wrong to me is marked with lightblue :
my code for the value pass is based on the vtk example RenderScalarToFloatBuffer , here it is :
imgextent = self.image_data.GetExtent()
renderer = vtk.vtkRenderer()
renderer.AddActor(self.mesh_actor)
renderer.SetUseDepthPeeling(True)
render_window = vtk.vtkRenderWindow()
render_window.SetMultiSamples(0)
render_window.SetSize(imgextent[1], imgextent[3])
render_window.OffScreenRenderingOn()
render_window.AddRenderer(renderer)
value_pass = vtk.vtkValuePass()
value_pass.SetInputArrayToProcess(vtk.VTK_SCALAR_MODE_USE_POINT_FIELD_DATA, "messurment1_dir1")
value_pass.SetInputComponentToProcess(0)
render_pass_collection = vtk.vtkRenderPassCollection()
render_pass_collection.AddItem(value_pass)
sequence_pass = vtk.vtkSequencePass()
sequence_pass.SetPasses(render_pass_collection)
camera_pass = vtk.vtkCameraPass()
camera_pass.SetDelegatePass(sequence_pass)
renderer.SetPass(camera_pass)
renderer.SetActiveCamera(self.renderInterface.GetActiveCamera())
render_window.Render()
buffer = value_pass.GetFloatImageDataArray(renderer)
ext = value_pass.GetFloatImageExtents()
pointer_hex = int(ext.split('_')[1], 16)
data_pointer = ctypes.cast(pointer_hex, ctypes.POINTER(ctypes.c_int))
ext = [data_pointer[0], data_pointer[1], data_pointer[2], data_pointer[3]]
print(ext)
width = ext[1]
height = ext[3]
f = open('mat.txt', 'w')
for i in range(width):
for j in range(height):
bufferIndex = i*height + j
value = buffer.GetValue(bufferIndex)
#print(value)
f.write(f"{value:9.4e}\n")
#f.write('\n')
#print()
f.close()
image = vtk.vtkImageData()
image.SetExtent(ext[0], ext[1], ext[2], ext[3], 0, 0)
image.GetPointData().SetScalars(buffer)
lut = vtk.vtkLookupTable()
lut.SetHueRange(0.6, 0)
lut.SetSaturationRange(1.0, 0)
lut.SetValueRange(0.5, 1.0)
lut.SetTableRange(image.GetScalarRange())
map_colors = vtk.vtkImageMapToColors()
map_colors.SetLookupTable(lut)
map_colors.SetInputDataObject(image)
map_colors.Update()
writer = vtk.vtkJPEGWriter()
writer.SetFileName("out.jpg")
writer.SetInputData(map_colors.GetOutput())
writer.Write()
I have also tried to use vtkDepthSortPolyData :
...
self.triangle_polydata = addScalarCellData(self.triangle_polydata, R1, "messurment1_dir1")
self.depthSortData = vtk.vtkDepthSortPolyData()
self.depthSortData.SetInputData(self.triangle_polydata)
self.depthSortData.SetCamera(self.renderInterface.GetActiveCamera())
self.depthSortData.SortScalarsOn()
self.depthSortData.SetDirectionToBackToFront()
#self.depthSortData.SetVector(1, 1, 1)
self.depthSortData.Update()
self.mesh_mapper = vtk.vtkPolyDataMapper()
self.mesh_mapper.SetInputData(self.depthSortData.GetOutput())
sr = 0.0005
self.mesh_mapper.SetScalarRange([0., sr])
self.mesh_mapper.SetLookupTable(self.lut)
self.mesh_actor = vtk.vtkActor()
self.mesh_actor.SetMapper(self.mesh_mapper)
...
Any suggestions would be highly appreciated. ![]()